I still think having your therapist walk alongside and unpredictably shove you would be more effective and faster for getting you to better balance recovery.
A novel wearable device to deliver unconstrained, unpredictable slip perturbations during gait
Abstract
Background
Task-specific perturbation training is a widely studied means of fall prevention, utilizing techniques that induce slips or slip-like perturbations during gait. Though effective, these methods only simulate narrow ranges within the larger space of possible slipping conditions encountered in daily life. Here we describe and test a novel, wearable apparatus designed to address these limitations and simulate a diverse range of slipping disturbances.Methods
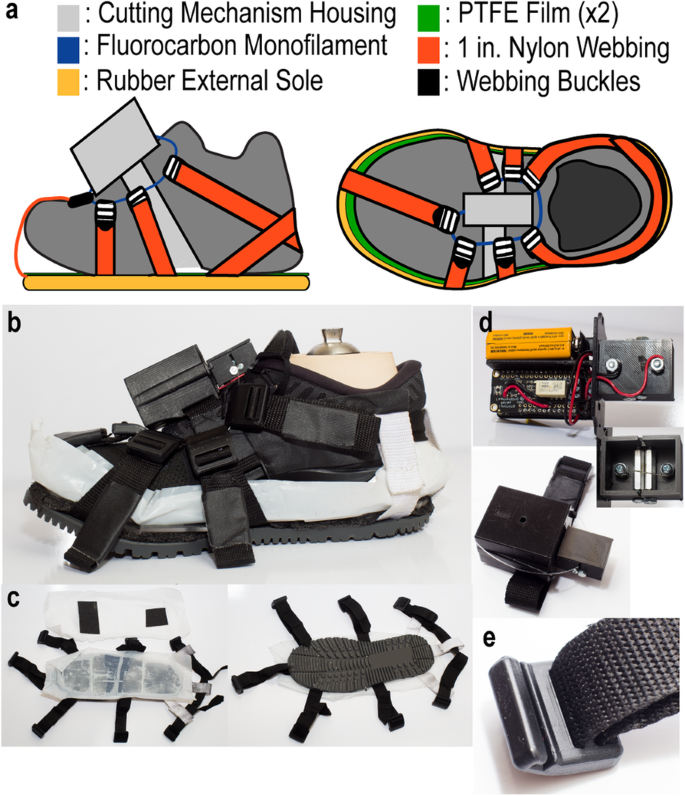
The device consists of wireless triggering and detachable outsole components that provide adequate friction with the floor when secured to the wearer’s foot, but suddenly create a low-friction surface underfoot upon release. “Benchtop” tests were carried out to quantify device triggering characteristics (i.e. cutting temperature, release delay) and the resulting friction reduction. The device was also tested on six healthy young adults (3 female, age 23 ± 2.4 years), who walked with and without the device to observe how gait kinematics and spatiotemporal parameters were influenced, then performed 12 walking trials ending with a slip delivered by the device. Each participant also completed a survey to obtain opinions on device safety, device comfort, slip realism, and slip difficulty. A linear mixed effects analysis was employed to compare subject spatiotemporal parameters with and without the apparatus, as well as correlation coefficients and root mean square errors (RMSE) to assess the impact of the device on lower limb gait kinematics. Slip onset phases, distances, directions, velocities, and recovery step locations were also calculated.Results
This device rapidly diminishes available friction from static coefficients of 0.48 to 0.07, albeit after a substantial delay (0.482 ± 0.181 s) between signal reception and outsole release. Strong correlations (R > 0.93) and small RMSE between gait kinematics with and without the device indicate minimal effects on natural gait patterns, however some spatiotemporal parameters were significantly impacted. A diverse range of slip perturbations and recovery steps were successfully elicited by the device.Conclusions
Our results highlight the efficacy and utility of a wearable slipping device to deliver diverse slip conditions. Such an apparatus enables the study of unconstrained slips administered across the gait cycle, as well as during different locomotor behaviors like turning, negotiating slopes, and level changes.Background
Task-specific training has gained popularity in rehabilitation as an effective intervention to regain [1, 2] and reinforce [3]
motor skills. This methodology closely mimics the sensorimotor and
environmental interactions of the target task, thereby forcing the
patient or subject to repetitively execute the movements necessary to
accomplish the goal of the task [4].
This paradigm is widely utilized in studies of gait stability and fall
prevention by administering repeated perturbations to an individual in
the form of simulated trips and slips [5,6,7].
Many successful task-specific techniques and apparatuses have been reported in the literature to study slipping perturbations in particular, the cause of 22–25% of falls in the community [8, 9]. Of these, the most widely used are sudden, transient accelerations on a treadmill during otherwise steady-state walking [10,11,12,13,14], one or more unlockable sliding platforms embedded in a level walkway [15,16,17], and oiled areas encountered along a path [18, 19]. Important advances in our understanding of reactions to “slip-and-fall” events across age groups, as well as supporting evidence for the potency of perturbation training on stability, have stemmed from the use of these perturbation methods. For example, arm swing in the sagittal plane mitigates deviations in trunk posture following a slip, an action that older adults are less able to utilize [19]. Individuals appear to transition from a reactive to anticipatory mechanism during perturbation training, characterized by an anteriorly-shifted center of mass (CoM), altered lower limb kinematics, and reduced heel contact velocity [17, 20]. Increases in compensatory step lengths [14], improved measures of stability immediately after slip onset and recovery step touchdown, and spatial-temporal adaptations [11] have also been reported. The adjustments obtained from treadmill slip training in particular can be scaled to match the intensity of perturbation [14], and those from sliding platforms can be generalized to other tasks of varying context similarity [21,22,23]. While these results have only been shown for their respective perturbation methods to date, the findings illustrate the potential plasticity of learned slip recovery strategies. After participating in a perturbation protocol, subjects have retained their acquired stabilization skills for months [22], and quickly readapt after periods over a year [23, 24].
Clearly, available methods for administering task-specific slip perturbations are capable of eliciting valuable insight on slip attributes, response movements, and stability adaptations. However, they have practical limitations associated with producing slips that are unexpected [6, 25], kinematically unconstrained [26], and that represent the variety of slip conditions encountered in daily life. Foot velocity, sliding distance, slip location, and/or slip direction are restricted with these procedures, narrowing the range of unique disturbances that can be applied. Specifically, emulated perturbations from sliding platforms and treadmills are limited entirely to the anterior-posterior direction, while actual slips possess a notable mediolateral component [26]. Slippery floor surfaces provide the most realistic disturbances when encountered, but they suffer from a high degree of predictability with repeated exposure [6, 25]. These constraints are inherent to the devices and methods used to administer the perturbations.
In order to reduce or remove these restrictions and allow for more realistic slips to be imposed, a new type of apparatus is required. Our aim was to develop such a device. Namely, this apparatus would deliver repeated slipping perturbations that were unconstrained in direction and magnitude, yet be spatially and temporally unpredictable to the wearer and controlled by an attending researcher or clinician. In addition, the slips delivered by this device could be delivered at any point during stance phase. We elected to pursue a wearable design, as this would remove the spatial predictability limitation while still allowing slips to be delivered during over-ground walking. Indeed, a previous exploration of the design space for variable-friction devices concluded that, compared to various environment-based approaches, a wearable, shoe-based option was the most promising [27]. Following development of the initial prototype, subject and non-subject tests were performed to quantify the functional attributes of the device, as well as assess and validate its ability to deliver diverse perturbations and elicit recovery reactions. Based on the results of these tests, we outline improvements to be made for future device iterations. Finally, we also highlight a number of previously inaccessible gait modalities and research topics that are unlocked with the use of a wearable slipping device.
Many successful task-specific techniques and apparatuses have been reported in the literature to study slipping perturbations in particular, the cause of 22–25% of falls in the community [8, 9]. Of these, the most widely used are sudden, transient accelerations on a treadmill during otherwise steady-state walking [10,11,12,13,14], one or more unlockable sliding platforms embedded in a level walkway [15,16,17], and oiled areas encountered along a path [18, 19]. Important advances in our understanding of reactions to “slip-and-fall” events across age groups, as well as supporting evidence for the potency of perturbation training on stability, have stemmed from the use of these perturbation methods. For example, arm swing in the sagittal plane mitigates deviations in trunk posture following a slip, an action that older adults are less able to utilize [19]. Individuals appear to transition from a reactive to anticipatory mechanism during perturbation training, characterized by an anteriorly-shifted center of mass (CoM), altered lower limb kinematics, and reduced heel contact velocity [17, 20]. Increases in compensatory step lengths [14], improved measures of stability immediately after slip onset and recovery step touchdown, and spatial-temporal adaptations [11] have also been reported. The adjustments obtained from treadmill slip training in particular can be scaled to match the intensity of perturbation [14], and those from sliding platforms can be generalized to other tasks of varying context similarity [21,22,23]. While these results have only been shown for their respective perturbation methods to date, the findings illustrate the potential plasticity of learned slip recovery strategies. After participating in a perturbation protocol, subjects have retained their acquired stabilization skills for months [22], and quickly readapt after periods over a year [23, 24].
Clearly, available methods for administering task-specific slip perturbations are capable of eliciting valuable insight on slip attributes, response movements, and stability adaptations. However, they have practical limitations associated with producing slips that are unexpected [6, 25], kinematically unconstrained [26], and that represent the variety of slip conditions encountered in daily life. Foot velocity, sliding distance, slip location, and/or slip direction are restricted with these procedures, narrowing the range of unique disturbances that can be applied. Specifically, emulated perturbations from sliding platforms and treadmills are limited entirely to the anterior-posterior direction, while actual slips possess a notable mediolateral component [26]. Slippery floor surfaces provide the most realistic disturbances when encountered, but they suffer from a high degree of predictability with repeated exposure [6, 25]. These constraints are inherent to the devices and methods used to administer the perturbations.
In order to reduce or remove these restrictions and allow for more realistic slips to be imposed, a new type of apparatus is required. Our aim was to develop such a device. Namely, this apparatus would deliver repeated slipping perturbations that were unconstrained in direction and magnitude, yet be spatially and temporally unpredictable to the wearer and controlled by an attending researcher or clinician. In addition, the slips delivered by this device could be delivered at any point during stance phase. We elected to pursue a wearable design, as this would remove the spatial predictability limitation while still allowing slips to be delivered during over-ground walking. Indeed, a previous exploration of the design space for variable-friction devices concluded that, compared to various environment-based approaches, a wearable, shoe-based option was the most promising [27]. Following development of the initial prototype, subject and non-subject tests were performed to quantify the functional attributes of the device, as well as assess and validate its ability to deliver diverse perturbations and elicit recovery reactions. Based on the results of these tests, we outline improvements to be made for future device iterations. Finally, we also highlight a number of previously inaccessible gait modalities and research topics that are unlocked with the use of a wearable slipping device.
No comments:
Post a Comment