Wrong, wrong, wrong goal. Survivors want 100% recovery not this tyranny of low expectations of reducing walking energy cost. Do you EVER THINK of what survivors want?
Reducing the metabolic energy of walking and running using an unpowered hip exoskeleton
Journal of NeuroEngineering and Rehabilitation volume 18, Article number: 95 (2021)
Abstract
Background
Walking and running are the most common means of locomotion in human daily life. People have made advances in developing separate exoskeletons to reduce the metabolic rate of walking or running. However, the combined requirements of overcoming the fundamental biomechanical differences between the two gaits and minimizing the metabolic penalty of the exoskeleton mass make it challenging to develop an exoskeleton that can reduce the metabolic energy during both gaits. Here we show that the metabolic energy of both walking and running can be reduced by regulating the metabolic energy of hip flexion during the common energy consumption period of the two gaits using an unpowered hip exoskeleton.
Methods
We analyzed the metabolic rates, muscle activities and spatiotemporal parameters of 9 healthy subjects (mean ± s.t.d; 24.9 ± 3.7 years, 66.9 ± 8.7 kg, 1.76 ± 0.05 m) walking on a treadmill at a speed of 1.5 m s−1 and running at a speed of 2.5 m s−1 with different spring stiffnesses. After obtaining the optimal spring stiffness, we recruited the participants to walk and run with the assistance from a spring with optimal stiffness at different speeds to demonstrate the generality of the proposed approach.
Results
We found that the common optimal exoskeleton spring stiffness for walking and running was 83 Nm Rad−1, corresponding to 7.2% ± 1.2% (mean ± s.e.m, paired t-test p < 0.01) and 6.8% ± 1.0% (p < 0.01) metabolic reductions compared to walking and running without exoskeleton. The metabolic energy within the tested speed range can be reduced with the assistance except for low-speed walking (1.0 m s−1). Participants showed different changes in muscle activities with the assistance of the proposed exoskeleton.
Conclusions
This paper first demonstrates that the metabolic cost of walking and running can be reduced using an unpowered hip exoskeleton to regulate the metabolic energy of hip flexion. The design method based on analyzing the common energy consumption characteristics between gaits may inspire future exoskeletons that assist multiple gaits. The results of different changes in muscle activities provide new insight into human response to the same assistive principle for different gaits (walking and running).
Background
Walking and running are the most common means of locomotion in human daily life. Through evolution over generations, the human anatomical bases have been well shaped to both walking and endurance running [1]. However, the efficiencies of positive work (positive mechanical power/net metabolic power) during walking and low-speed running are still not perfect, only 0.26–0.35 and 0.35–0.41 respectively [2], which is one of the direct factors that affect human locomotion performance. Therefore, people have been searching for different ways to enhance energy efficiency and thus reduce the metabolic energy of walking and running.
Over the past six years, great progress has been made in the study of exoskeletons for reducing the metabolic rate of walking or running [3]. In studies on exoskeletons for walking assistance, both autonomous powered [4,5,6] and unpowered [7,8,9] exoskeletons were demonstrated to reduce metabolic cost. It has been found that the assistance of the net mechanical power input of the powered exoskeletons at specific phases, such as during ankle push-off [4, 5] or hip flexion/extension [6] in the stance phase, can decrease the biological positive joint power, and thus reduce the overall metabolic cost during walking. As alternatives, unpowered exoskeletons, which exploit springs to assist humans in recycling energy [7, 8] and transferring energy [9] more efficiently, reduced the metabolic rate by improving the human-exoskeleton energy efficiency as a whole. There have also been breakthroughs in unpowered [10, 11], tethered powered [12] and autonomous powered exoskeletons [13, 14] that reduce the metabolic rate of running. Unpowered exoskeletons [10, 11], which were designed based on a biomechanical analysis of running, enhance the energy efficiency during specific gait phases while simplifying the exoskeleton structure to reduce the metabolic penalty caused by mass. Lee et al. found that the metabolic cost of running can be reduced with a simulation-optimized actuation profile using a tethered soft exosuit [12]. Kim et al. proposed an online detection algorithm that enables the soft exosuit to switch seamlessly between walking and running [13]. These two studies provide a solid foundation for the soft exosuit to reduce the metabolic cost of both walking and running by 9.3% and 4.0% respectively [14]. This is also the only autonomous powered exoskeleton that can reduce the metabolic rates of both walking and running. To date, the studies on exoskeletons that can reduce the metabolic cost of both walking and running are limited.
Several critical factors may be obstacles to enhancing the economy for both walking and running. One of the challenges is how to overcome the fundamental biomechanical differences between walking and running [14]. With the increasing speed, humans spontaneously transit from walking like an inverted pendulum [15] to the more bouncing gait of running [16], and both muscle behavior [17, 18] and joint mechanical power [2] show significant changes, which may result in different assistive approaches or different optimal assistance magnitudes and timings [10, 19]. However, unlike the hip exosuit [14], which can provide customized assistance based on differences in the natural COM fluctuation of participants, most exoskeletons have been designed based on the biomechanical analysis of walking or running, resulting in most exoskeletons providing effective assistance only for specific gaits. The unpowered ankle exoskeleton [7], which uses a spring-clutch mechanism to reduce the muscle effort of plantar flexors during the mid-stance phase, was demonstrated to reduce the metabolic rate of walking by 7.2%. On the contrary, the authors found that the energy expenditure was increased by 11.1% when this passive assistive principle was applied to running scenarios [19]. The primary reason might be the different energy consumption characteristics of ankle joint between slow walking and moderate-speed running [20]. The benefits of passive assistance may be limited by the fact that the ankle performs significantly more positive mechanical work than negative mechanical work in the late stance phase during running. Similarly, the hip unpowered exoskeleton, which exploits a torsional spring to recycle contralateral hip joint energy to assist both hip flexion and hip extension, can reduce the metabolic cost of running by 8% but was found to be ineffective in walking [10]. As the hip joint does not produce positive power during the late swing phase of walking, which is different from running, the hip extension assistance of the exoskeleton interfered with the natural biomechanics of hip muscle during passive leg swing in process of walking.
Another challenge is how to minimize the metabolic penalty of the added exoskeleton mass while providing effective assistance for both gaits. Previous work showed that every kilogram of mass added to the lower limb segments from proximal to distal to trunk results in 1.4–4.4 times the metabolic penalty during running than the during walking (summarized in the Additional material of [14]). In the previous studies on exoskeletons, researchers reduced the metabolic penalty by using lightweight soft materials to construct the exoskeleton frame [21], concentrating the mass of motor combinations and the battery close to the trunk and transferring assistive power to the distal joint through a remote transmission mechanism [21, 22]. However, the metabolic penalty of the exoskeleton mass was still not negligible for the powered exoskeleton. Although the best-in-class hip exo-suit [14] was demonstrated to benefit both walking and running, the metabolic reduction for running was significantly lower than the for walking. One of the most likely reasons might be that the assistance effect was partly offset by the greater metabolic penalty of the same exoskeleton mass.
As mentioned above, the combined requirements of overcoming fundamental biomechanical differences between the two gaits and minimizing the metabolic penalty of the exoskeleton mass make it challenging to develop an exoskeleton that can reduce the metabolic energy for both gaits. In this paper, we first analyze the common energy consumption characteristics of walking and running (Fig. 1) to find a universal assistive principle for both gaits. Then we propose a hip unpowered exoskeleton (Fig. 2A and B) to regulate metabolic energy of hip flexion during the common energy consumption period of both walking and running. The proposed exoskeleton uses exo-tendons acting in front of the hip joint to recycle the negative mechanical energy and release stored energy to assist hip flexor, which are in accordance with the biological negative mechanical power interval and positive mechanical power interval respectively (Fig. 2C). The lightweight structure, close to the human trunk, minimizes the metabolic penalty caused by the exoskeleton mass. To determine the best assistance magnitude and evaluate human response to the proposed assistive principle, the metabolic rates, muscle activities and spatiotemporal parameters of nine healthy participants are measured and statistically analyzed. We also perform speed experiments to test the influence of locomotion speed on the assistance effect. To demonstrate the generality of the proposed exoskeleton, we measure and compared the metabolic rate of walking/running with the common optimal spring stiffness to that of walking/running without the exoskeleton.
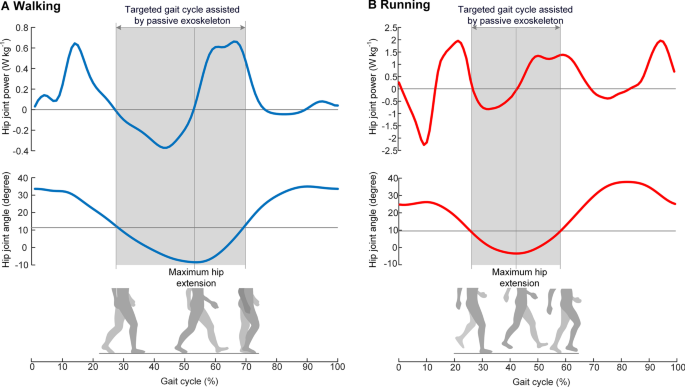
Hip joint power during walking and running. In the shaded interval of both walking and running, the hip joint extends from about 10 degrees of flexion position to the maximum extension position, corresponding to a period of negative power; Then, the hip joint flexes from the maximum extension position, corresponding to a period of positive work. The dataset of walking is the mean value of 7 participants (mean ± s.t.d; age, 26.9 ± 3.0 years; height,169.2 ± 7.0 cm; weight, 66.3 ± 14.2 kg), which is reported by [42]; The dataset of running is the mean value of 7 participants (mean ± s.t.d; age, 32.7 ± 5.6 years; height, 176.9 ± 6.2 cm; weight, 67.0 ± 8.9 kg), which is reported by [43]
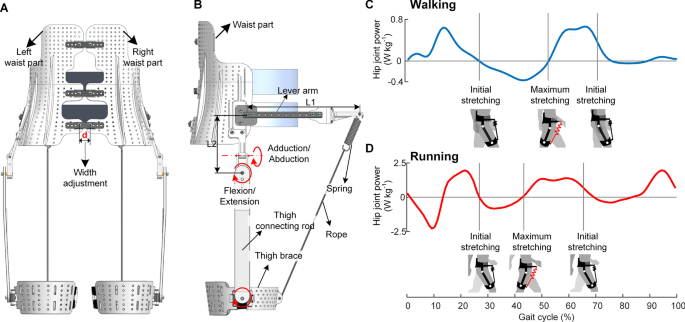
Exoskeleton components and working process of the exoskeleton. A Back view of the exoskeleton. We change the length of d to adjust the width of the two waist parts for best-fit participants. B Right view of the exoskeleton. The waist part and thigh connecting rods were connected using two rotary joints with plain bearing in series, allowing the adduction/abduction and flexion/extension of the hip joint. C and D Working process of the exoskeleton. The assistance interval is in accordance with the hip joint negative and positive mechanical power during walking and running. In the walking and running condition, the assistance started at nearly 10 degrees of hip flexion position. During the negative power period of the hip joint, the spring stores energy with the hip extension to its maximum extension position. During the positive power period of the hip joint, the spring releases the stored energy to assist hip flexion to 10 degrees of hip flexion position
No comments:
Post a Comment